Engineering Dynamics Equation Sheet
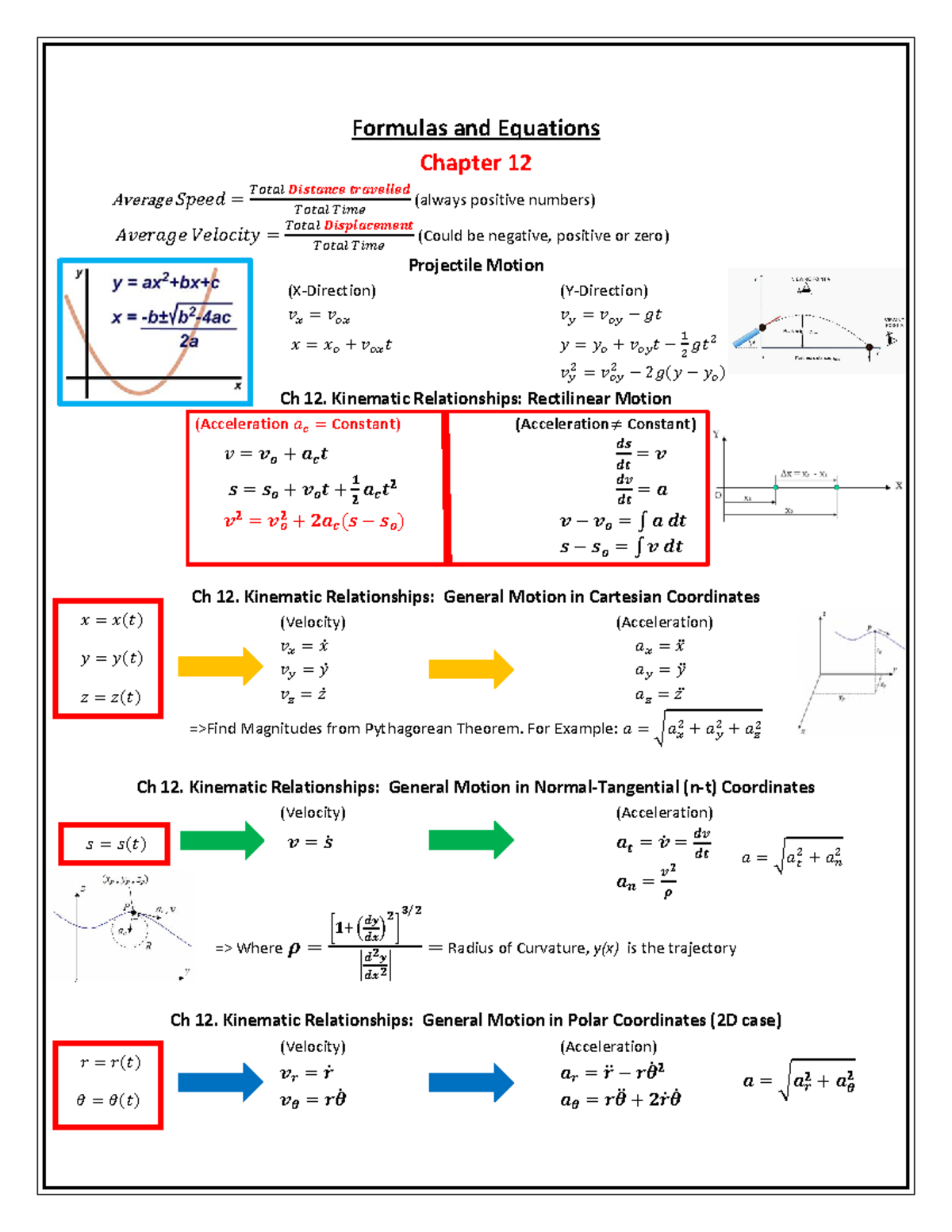
Engineering Dynamics Equation Sheet - Equation sheet ~v p = _x^i+ _y^j =v pe^ t = _re^ r+r _^e ~a p = x^i+ y^j = _v p^e t+ v2 p ˆ e^ n =( r r _2)^e r+(r +2_r _)^e ~v b= ~v a+ !~ ~r b=a ~a b=~a a+ ~ ~r b=a+ !~!~ ~r ~v b= ~v a+(~v b=a) rel+ !~ ~r b=a ~a b=~a a+(~a b=a) rel+ ~ ~r b=a+2!~ (~v ) rel+ !~!~ ~r f~= m~a g m~ a= i a ~+~r g=a m~a a t 1 +v 1 +u 1 nc!2 = t 2 +v 2 t. Web equation sheet for engineering mechanics 12 dynamics. Mechanics is a branch of the physical sciences. (2) 2 linear and curvilinear motion 2.1 motion along a path s, s˙ = v. Web equation sheet 1 newtons second law and equations of kinematics the net force f on a particle of mass mis given by x i f i= f = ma = m dv dt. More info syllabus newton's laws, vectors, and reference frames. (1) for a system of particles f = ma g= mv˙ g. S¨ = ˙v= a, ads= vdv. = 0+ = 0+ 0 + 2 2 Web 0 engineering dynamics formula sheet rectilinear motion = = = constant acceleration:
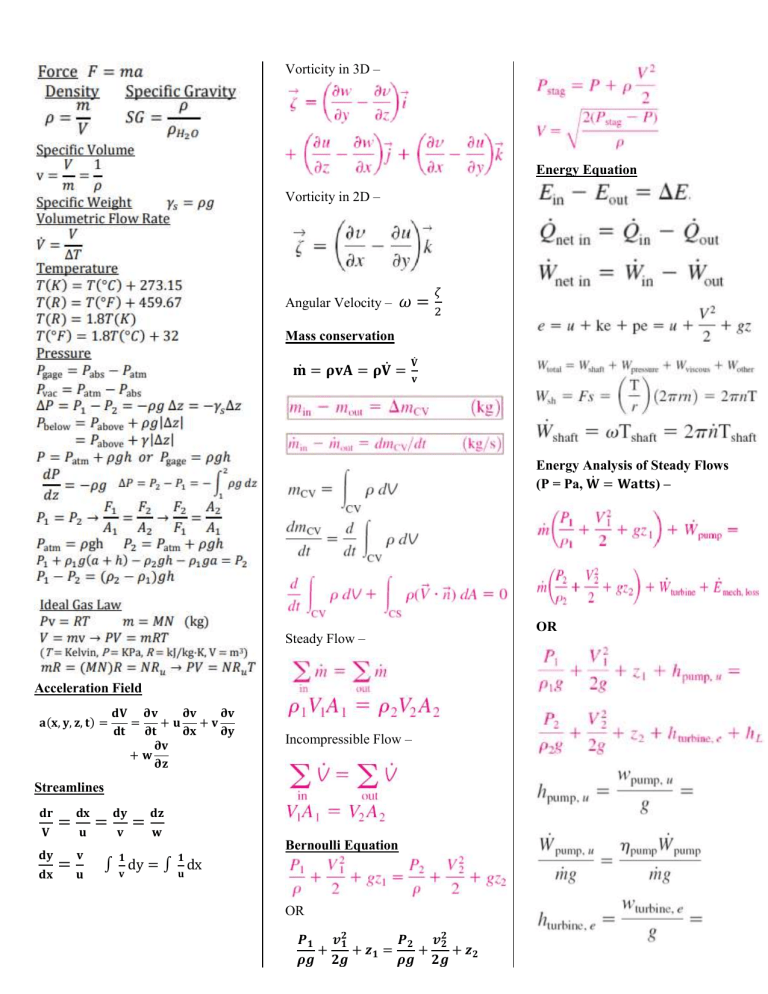
Fluid Mechanics Equation Sheet 2(1)

Formula Sheet CE1011 Engineering Mechanics Dynamics 1 FORMULA SHEET

Mechanical Engineering Statics Formula Sheet

Fluid Dynamics Cheat Sheet Fluid Dynamics Reynolds Number

Mechanical Design Equation Sheet Belt (Mechanical) Classical
Ch 12,13,14,15 16Ready 2017 Spring Formula Sheets Formulas and

The Euler equations of fluid dynamics in twodimensional, steady form

Statics Cheatsheet I by girlfit on DeviantArt

Engineering formula sheet Engineering notes, Physics and mathematics

Dynamics Cheat Sheet M E 234 Studocu
Web 0 Engineering Dynamics Formula Sheet Rectilinear Motion = = = Constant Acceleration:
(2) 2 linear and curvilinear motion 2.1 motion along a path s, s˙ = v. (1) for a system of particles f = ma g= mv˙ g. Web equation sheet 1 newtons second law and equations of kinematics the net force f on a particle of mass mis given by x i f i= f = ma = m dv dt. Web equation sheet for engineering mechanics 12 dynamics.
More Info Syllabus Newton's Laws, Vectors, And Reference Frames.
S¨ = ˙v= a, ads= vdv. Equation sheet ~v p = _x^i+ _y^j =v pe^ t = _re^ r+r _^e ~a p = x^i+ y^j = _v p^e t+ v2 p ˆ e^ n =( r r _2)^e r+(r +2_r _)^e ~v b= ~v a+ !~ ~r b=a ~a b=~a a+ ~ ~r b=a+ !~!~ ~r ~v b= ~v a+(~v b=a) rel+ !~ ~r b=a ~a b=~a a+(~a b=a) rel+ ~ ~r b=a+2!~ (~v ) rel+ !~!~ ~r f~= m~a g m~ a= i a ~+~r g=a m~a a t 1 +v 1 +u 1 nc!2 = t 2 +v 2 t. Mechanics is a branch of the physical sciences. (3) 2.2 angular motion relations θ, θ˙ = ω.